|
153| 6
|
[项目] 【Arduino 动手做】集成了智控和271颗LED灯的六足机器人 |
|
## 补给品 螺丝: M2(小头)6mm *8 M3(小头)10mm *12 M3(小头)14mm *12 M3(小头)20mm *6 M3(小头)30mm *12 M3(沉头)6mm *4 M3(沉头)10mm *4 M5(沉头)10mm *30 M3螺母(方形)*48 M3热定型刀片(外径5)5mm *53 M5热定型刀片(外径7)5mm *42 电子产品: STM32...C8T6(蓝色药丸)*1 HC-05(蓝牙模块) PCA9865(伺服驱动器)*2 XL4016E1(降压转换器)*1 XL6009(蓝色好)*1 LED 环 60 *1 LED 环 16 *1 LED 环 8 *1 LED灯带 144LED/米 *2 18650电池*4 HX-2S-JH20 *1 MGN996舵机*18 XT60母头*1 XT60公头*1 电线(16awg、20awg、信号线、屏蔽线) 您还需要一个 ST-Link(或其他编程器)和一部手机。 对于我来说,所有东西加起来(不包括运费)花费大约是 120 欧元,但根据购买地点、时间和方式,这可能会有很大差异。 有关价格和链接等更多信息,请查看GitHub上的 Excel 表。 ## 步骤1:打印 以下是您需要打印的所有部件。所有部件均已正确定向,并在需要的地方添加了支撑。所有部件的设计都尽可能地减少了支撑。 除了 leg_set 和 leg_set_mirrored 需要分别打印 3 次之外,其余所有内容都打印一次。 有些车身部件占据了整个打印区域,所以你需要一个调平的打印平台,或者更好的是网状床面调平。我没有,但效果还是不错的。 对于 bushing_set,您需要尝试不同的 XY 补偿值。这些衬套需要在每个关节处增加一些阻力,以减少抖动。 我打印了三个外壳和 10% 的填充物。 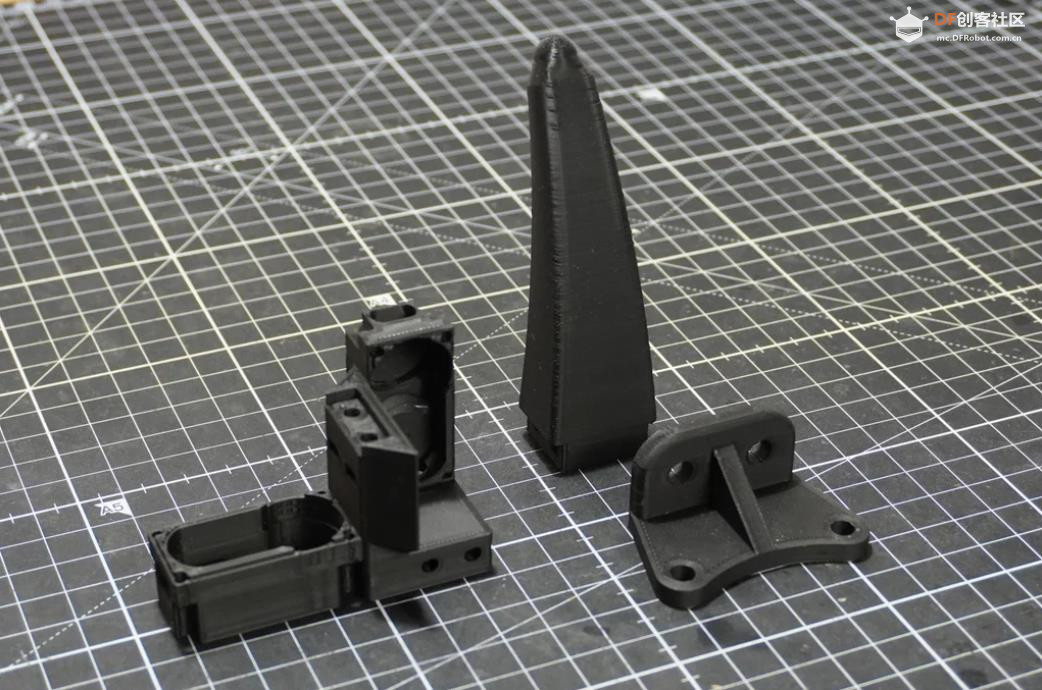  |
|
## 第 2 步:腿部和身体 准备好所有部件后,就可以开始搭建腿部了。我没有详细的腿部和身体搭建说明,但你可以观看我两个视频的搭建合集,看看组装好的3D模型。 我强烈建议先搭建一个单腿,练习一下,同时也能找到合适的衬套参数。如果衬套太松,腿会抖动。如果衬套太紧,腿根本动不了。一般来说,伺服电机移动的质量越大,所需的阻力就越大。 另外,在搭建腿部之前,务必将每个舵机归零。搭建时,确保每个关节呈 90° 角。腿部的弯曲会让这个问题更加棘手。 这是确保每条腿的 IK 系统正常工作所必需的。即使出现轻微偏差(这种情况肯定会发生),您也必须尝试不同的偏移值(在“output.cpp”中)来调整每条腿的 IK 值。   |
|
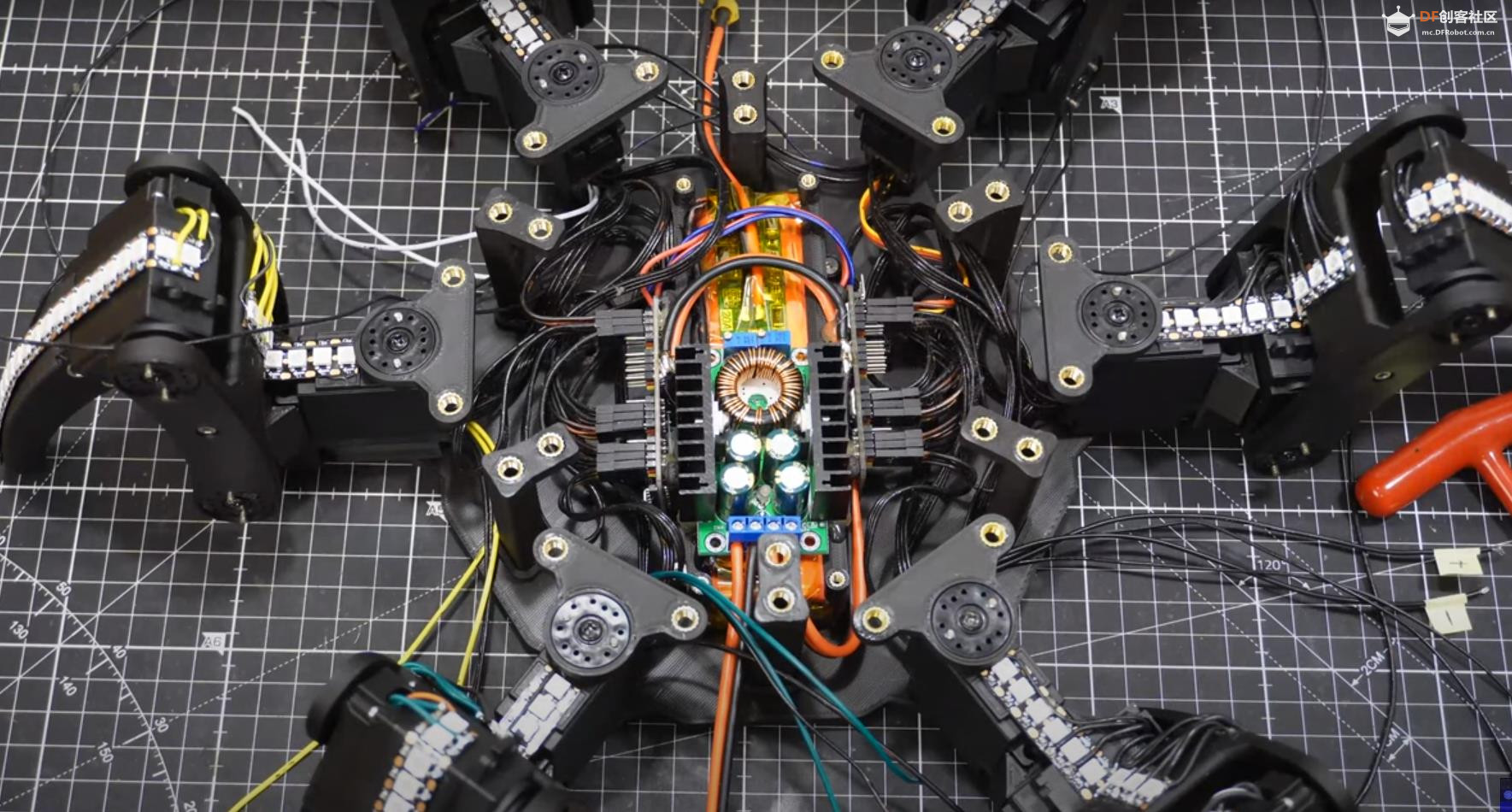
## 步骤3:接线 按照上面的接线图连接所有部件。如果分辨率不够,可以在GitHub上找到图片。务必使用屏蔽线连接 STM32 和伺服驱动器。如果没有屏蔽线,我遇到了一些干扰问题。 这里缺少一点,那就是电池和其余电路之间的XT60连接。你需要一种方法来关闭六足机器人。 LED 全部按以下顺序串联连接:眼睛中心、眼睛中环、眼睛外环、底环、腿[(右前)根部->尖端(顺时针方向) 对于舵机,你可以将它们连接到任何最方便的地方。但是,你需要在“output.cpp”文件中正确设置每个舵机的通道。 Leg[0].Servo[0].ch = 2; Leg[0].Servo[1].ch = 1; Leg[0].Servo[2].ch = 0; Leg[1].Servo[0].ch = 6; Leg[1].Servo[1].ch = 5; Leg[1].Servo[2].ch = 4; Leg[2].Servo[0].ch = 13; Leg[2].Servo[1].ch = 14; Leg[2].Servo[2].ch = 15; Leg[3].Servo[0].ch = 18; Leg[3].Servo[1].ch = 17; Leg[3].Servo[2].ch = 16; Leg[4].Servo[0].ch = 25; Leg[4].Servo[1].ch = 26; Leg[4].Servo[2].ch = 27; Leg[5].Servo[0].ch = 29; 腿[5].伺服[1].ch = 30; 腿[5].伺服[2].ch = 31; 有关命名信息,请参阅GitHub页面 在该节点上,确保桥接其中一个伺服驱动器的第一个焊盘。这将确保它使用不同的 I2C 地址。第二个驱动器将沿用第一个驱动器的通道编号 (16-31)。 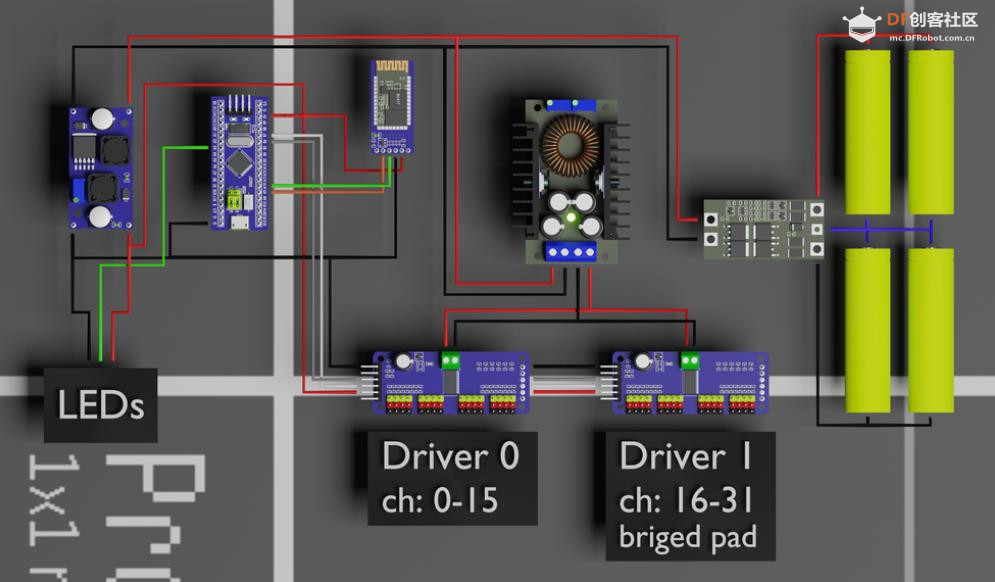 |
|
## 步骤4:编程 代码是用带有平台 IO 扩展的 Visual Studio Code 编写的。我无法在这里上传这些文件,所以你必须从GitHub下载。 要上传它,请确保您已安装 VS Code 和 PlatformIO,并将从 GitHub 下载的代码作为项目添加到 PlatformIO 插件中。 从这里上传代码。请务必使用 ST-Link 进行上传。您可以使用简单的 FTDI 编程器或类似工具,但需要拔下蓝牙模块才能连接,并将 platformio.ini 文件中的“upload_protocol”从“stlink”更改为编程器所需的协议。点击此处了解更多信息。 如果您出于某种原因想要停用某些功能,例如 LED,您可以在“header.h”文件中注释掉不需要的部分。这对于测试新功能非常有用。 您还需要通过在 output.cpp 文件中设置每个伺服器的 angleOffset 来微调伺服器角度。如果您设置的值正确,它应该看起来像上面的图片一样。为了更容易操作,您可以取消注释“header.h”文件中的“#define SERVO_CALIBRATION”。这会将每条腿移动到其原点。 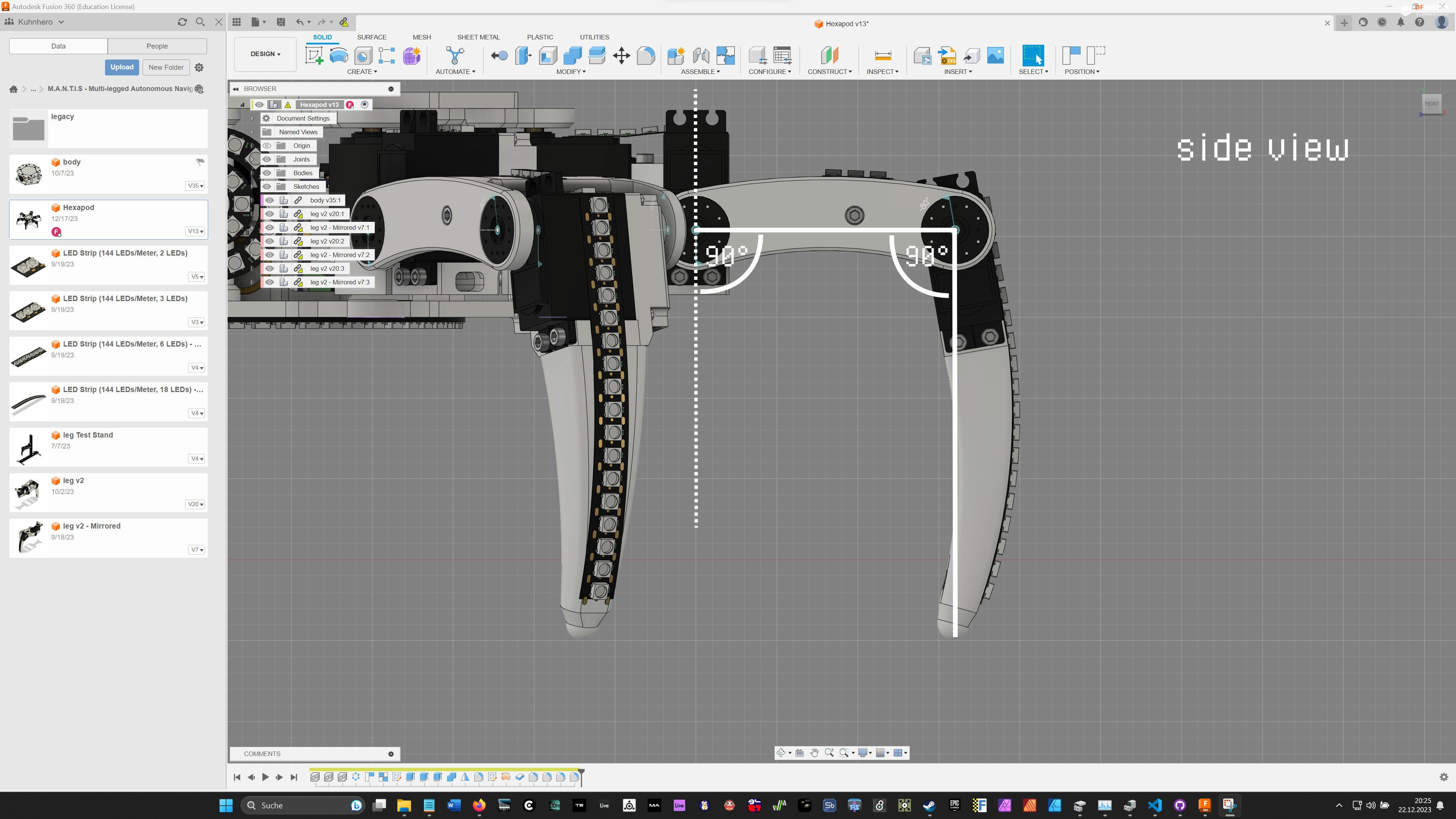  |
|
## 步骤5:安装远程应用程序 按照以下步骤安装应用程序。您会收到一条消息,提示安装过程可能存在危险。这很正常,所以不用担心。如果您不相信我,可以查看GitHub上的 MIT App Inventor 项目文件,然后自行编译。 安装完成后,请确保允许“附近的设备”。这是应用程序查找可用蓝牙设备所必需的。 请注意,有用于控制六足动物 LED 的滑块,但目前已被禁用以减少延迟。 附件 下载 {{ file.name }}Hexapod Remote v1.2.apk下载 ## 步骤 6:连接到六足动物 剩下要做的就是连接到六足机器人。 打开 Hexapod 并将其与手机蓝牙设置中的蓝牙模块配对(只需执行一次)。默认密码为 1234 或 0000。 完成后,打开 Hexapod Remote 应用程序并连接到蓝牙模块。 一旦连接,六足机器人将有一个简单的启动动画,现在您可以使用两个摇杆控制六足机器人,有点像无人机。 ## 第七步:欣赏你的作品 看到这个项目成功运行,对我来说是最有成就感的事情。我知道大多数人不会搭建这么复杂的东西,但我仍然希望能够激励你去构建自己的机器人项目。  |


 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖