步骤6:上传代码
上传代码
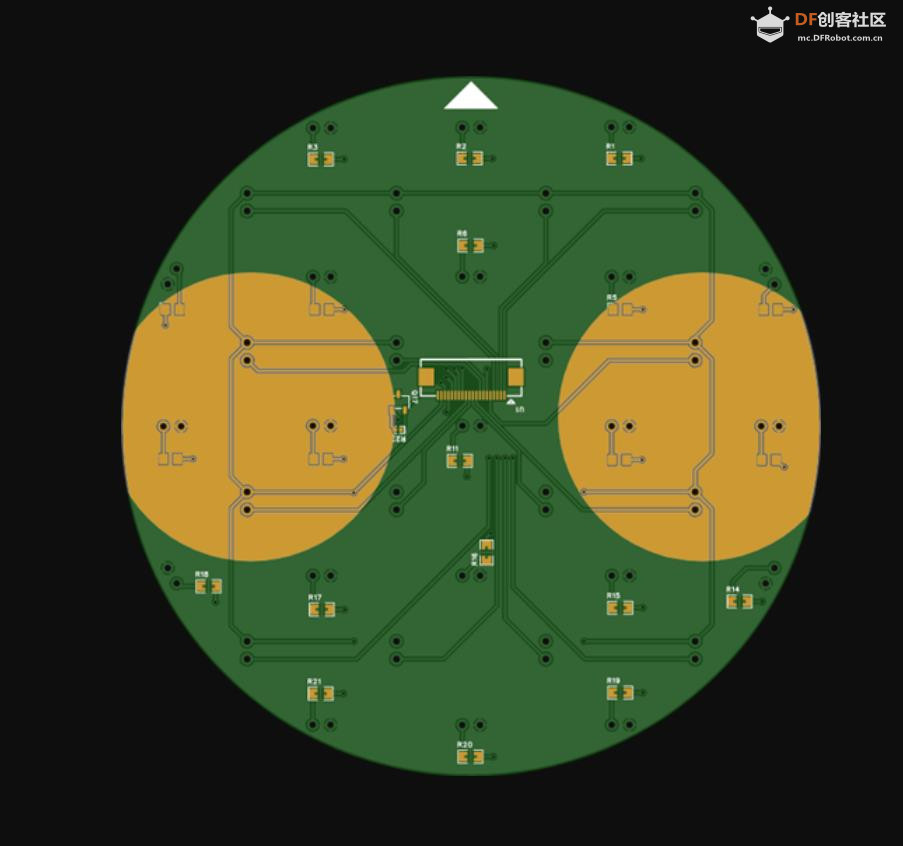
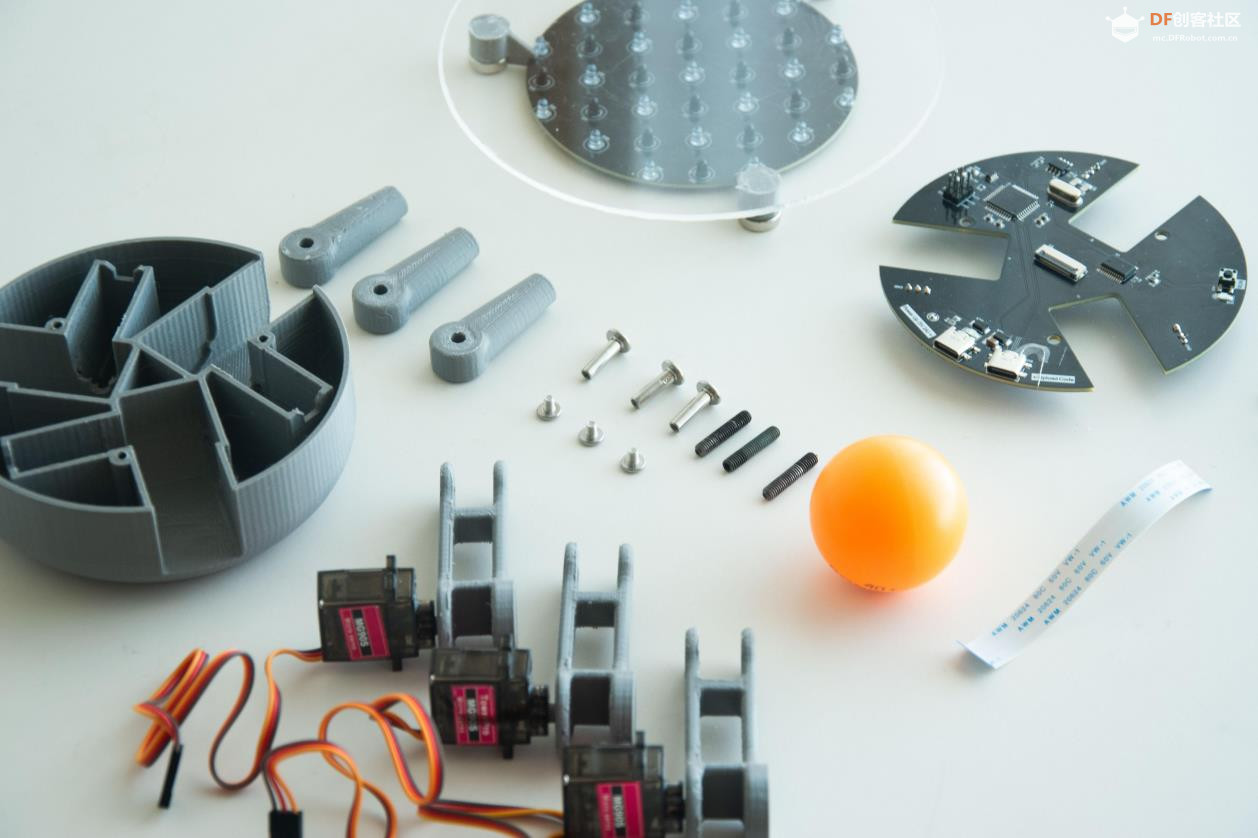
使用 Arduino IDE 将固件上传到 PCB 上的 ATmega32U4 微控制器。代码是开源的,可在GitHub页面上获取。代码已添加注释,以帮助您理解其工作原理。项目最终完成后,我们将在 ba-bot.com 上发布更详细的说明。
- #include <math.h>
-
- // ---- PID Coefficients ----
- const float P_GAIN = 2.0;
- const float I_GAIN = 0.1;
- const float D_GAIN = 30.0;
-
- // ---- Smoothing Factors ----
- const float EMA_ALPHA = 0.9; // Exponential moving average
- const float IR_ALPHA = 0.5; // IR signal low-pass filter
-
- // ---- Mechanical Constants ----
- const float DEG2RAD = M_PI / 180.0;
- const float RAD2DEG = 180.0 / M_PI;
- const float R1 = 50.0; // Servo arm length [mm]
- const float R2 = 39.2; // Passive link length [mm]
- const float BASE_R = 32.9 / sqrt(3.0); // Base triangle radius [mm]
- const float PLAT_R = 107.9 / sqrt(3.0); // Platform triangle radius [mm]
-
- // ---- Pin Assignments ----
- // Control
- const int BUTTON_PIN = A1;
- const int LED_PIN = 8;
-
- // IR Sensor
- const int IR_LED_PIN = 7;
- const int IR_RECEIVER_PIN= A0;
-
- // Digital Potentiometer (MCP42xx)
- const int DIGIPOT_CS = 4;
- const int DIGIPOT_DIN = 1;
- const int DIGIPOT_SCLK = 0;
-
- // Servo pins
- const int SERVO_PIN_A = 10;
- const int SERVO_PIN_B = 9;
- const int SERVO_PIN_C = 11;
-
- // Button press timings [ms]
- const unsigned long SHORT_PRESS_TIME = 50;
- const unsigned long LONG_PRESS_TIME = 1000;
- const unsigned long DOUBLE_PRESS_TIME = 350;
-
- // ---- Globals ----
- // IR measurements and center tracking
- int ambientLight[16] = {0};
- int irLight[16] = {0};
- float irSignal[16] = {0.0};
-
- float centerX = 0.0;
- float centerY = 0.0;
- float setpointX = 0.0;
- float setpointY = 0.0;
-
- // PID state
- float lastErrorX = 0.0;
- float lastErrorY = 0.0;
- float integralX = 0.0;
- float integralY = 0.0;
-
- // Ball tracking
- bool ballWasOnPlate = false;
- unsigned long ballLostTime = 0;
-
- // Button state
- bool buttonPressed = false;
- unsigned long pressStart = 0;
- unsigned long lastPress = 0;
- bool singlePressFlag = false;
-
- // Trajectory
- float trajectoryAngle = 0.0;
-
- // ---- Objects ----
- CD74HC4067 mux(5, 13, 6, 12); // S0,S1 -> 13, S2->6, S3->12
- Servo servoA, servoB, servoC;
-
- // ---- Kalman Filter Definition ----
- struct KalmanFilter {
- float x = 0, v = 0, p = 1;
- const float q = 0.3, r = 1.0;
- void update(float z, float dt) {
- // Prediction
- x += v * dt;
- p += q;
- // Correction
- float k = p / (p + r);
- v += k * ((z - x) / dt);
- x += k * (z - x);
- p *= (1 - k);
- }
- };
- KalmanFilter kfX, kfY;
-
- // ---- Function Prototypes ----
- void blinkLED(unsigned long interval);
- void measureIR();
- void setDigitalPot(byte value);
- bool ballOnPlate();
- void computeCenter(float rawX, float rawY);
- void pidControl(float input, float setpoint, float &lastError, float &integral, float &output);
- void movePlatform(float rollDeg, float pitchDeg, float height);
- void moveServos(float a, float b, float c);
- void checkButton();
- void calculateWeightedCenter(const float ir[], float &x, float &y);
- void sendSerialData();
- void setTrajectory(float radius, float speed);
-
- // ---- Arduino Setup ----
- void setup() {
- pinMode(BUTTON_PIN, INPUT);
- pinMode(LED_PIN, OUTPUT);
- pinMode(IR_LED_PIN, OUTPUT);
- pinMode(DIGIPOT_CS, OUTPUT);
- pinMode(DIGIPOT_DIN, OUTPUT);
- pinMode(DIGIPOT_SCLK, OUTPUT);
- digitalWrite(DIGIPOT_CS, HIGH);
-
- servoA.attach(SERVO_PIN_A);
- servoB.attach(SERVO_PIN_B);
- servoC.attach(SERVO_PIN_C);
-
- // Initialize platform to neutral
- movePlatform(0, -20, 60);
- delay(1000);
-
- Serial.begin(115200);
- }
-
- // ---- Main Loop ----
- void loop() {
- static unsigned long lastTime = 0;
- unsigned long now = millis();
- float dt = (now - lastTime) / 1000.0;
-
- blinkLED(300);
- setDigitalPot(255);
- measureIR();
- checkButton();
- sendSerialData();
-
- if (ballOnPlate()) {
- ballWasOnPlate = true;
- ballLostTime = now;
-
- // Raw center calculation
- float rawX, rawY;
- calculateWeightedCenter(irSignal, rawX, rawY);
-
- // Kalman & EMA filters
- kfX.update(rawX, dt);
- kfY.update(rawY, dt);
- centerX = EMA_ALPHA * rawX + (1 - EMA_ALPHA) * kfX.x;
- centerY = EMA_ALPHA * rawY + (1 - EMA_ALPHA) * kfY.x;
-
- // PID
- float outputX, outputY;
- pidControl(centerX, setpointX, lastErrorX, integralX, outputX);
- pidControl(centerY, setpointY, lastErrorY, integralY, outputY);
-
- movePlatform(outputX, outputY, 60);
- }
- else {
- if (ballWasOnPlate && now - ballLostTime < 1000) {
- // hold last
- movePlatform(0, 0, 60);
- } else {
- ballWasOnPlate = false;
- integralX = integralY = 0;
- lastErrorX = lastErrorY = 0;
- setpointX = setpointY = 0;
- movePlatform(0, -20, 60);
- }
- }
-
- lastTime = now;
- }
-
- // ---- Utility Functions ----
-
- void blinkLED(unsigned long interval) {
- static unsigned long lastToggle = 0;
- if (millis() - lastToggle >= interval) {
- digitalWrite(LED_PIN, !digitalRead(LED_PIN));
- lastToggle = millis();
- }
- }
-
- void setDigitalPot(byte val) {
- digitalWrite(DIGIPOT_CS, LOW);
- for (int i = 7; i >= 0; --i) {
- digitalWrite(DIGIPOT_DIN, (val & (1 << i)) ? HIGH : LOW);
- digitalWrite(DIGIPOT_SCLK, LOW);
- delayMicroseconds(10);
- digitalWrite(DIGIPOT_SCLK, HIGH);
- delayMicroseconds(10);
- }
- digitalWrite(DIGIPOT_CS, HIGH);
- }
-
- void measureIR() {
- // Ambient
- digitalWrite(IR_LED_PIN, LOW);
- delay(1);
- for (int i = 0; i < 16; i++) {
- mux.channel(i);
- delayMicroseconds(250);
- ambientLight[i] = analogRead(IR_RECEIVER_PIN);
- }
- // IR On
- digitalWrite(IR_LED_PIN, HIGH);
- delay(5);
- for (int i = 0; i < 16; i++) {
- mux.channel(i);
- delayMicroseconds(250);
- irLight[i] = analogRead(IR_RECEIVER_PIN);
- }
- // Compute signal
- for (int i = 0; i < 16; i++) {
- float delta = irLight[i] - ambientLight[i];
- irSignal[i] = IR_ALPHA * delta + (1 - IR_ALPHA) * irSignal[i];
- }
- }
-
- bool ballOnPlate() {
- long sum = 0;
- int maxVal = irSignal[0];
- for (int i = 0; i < 16; i++) {
- sum += irSignal[i];
- maxVal = max(maxVal, int(irSignal[i]));
- }
- float avg = sum / 16.0;
- return maxVal > 1.5 * avg;
- }
-
- void pidControl(float input, float target, float &lastErr, float &integ, float &out) {
- float error = target - input;
- integ += I_GAIN * error;
- float deriv = D_GAIN * (error - lastErr);
- out = P_GAIN * error + integ + deriv;
- lastErr = error;
- }
-
- void movePlatform(float rollDeg, float pitchDeg, float height) {
- float roll = -rollDeg * DEG2RAD;
- float pitch = -pitchDeg * DEG2RAD;
- float baseAngle[3] = {0, 120 * DEG2RAD, 240 * DEG2RAD};
- float platX[3], platY[3], platZ[3], angles[3];
-
- // Transform platform points
- for (int i = 0; i < 3; i++) {
- float a = baseAngle[i];
- float px = PLAT_R * cos(a);
- float py = PLAT_R * sin(a);
- float pz = height;
-
- // Pitch
- float x1 = px * cos(pitch) + pz * sin(pitch);
- float z1 = -px * sin(pitch) + pz * cos(pitch);
- // Roll
- float y1 = py * cos(roll) - z1 * sin(roll);
- float z2 = py * sin(roll) + z1 * cos(roll);
-
- platX[i] = x1; platY[i] = y1; platZ[i] = z2;
- }
- // Calculate servo angles
- for (int i = 0; i < 3; i++) {
- float a = baseAngle[i];
- float bx = BASE_R * cos(a);
- float by = BASE_R * sin(a);
- float dx = platX[i] - bx;
- float dy = platY[i] - by;
- float dz = platZ[i];
- float dxl = dx * cos(a) + dy * sin(a);
- float dyl = dz;
- float d = sqrt(dxl*dxl + dyl*dyl);
- float theta = atan2(dyl, dxl) - acos(constrain((R1*R1 + d*d - R2*R2)/(2*R1*d), -1, 1));
- angles[i] = theta * RAD2DEG;
- }
- moveServos(angles[0], angles[1], angles[2]);
- }
-
- void moveServos(float a, float b, float c) {
- a = constrain(a, -10, 65);
- b = constrain(b, -10, 65);
- c = constrain(c, -10, 65);
- servoA.write(100 - a);
- servoB.write(100 - b);
- servoC.write(100 - c);
- }
-
- void calculateWeightedCenter(const float arr[], float &x, float &y) {
- // If insufficient contrast, return (0,0)
- float minV = arr[0], maxV = arr[0];
- for (int i = 1; i < 16; i++) {
- minV = min(minV, arr[i]);
- maxV = max(maxV, arr[i]);
- }
- if (maxV - minV < 150) { x = y = 0; return; }
-
- const float coordsX[16] = {0,1,2,3, 0,1,2,3, 0,1,2,3, 0,1,2,3};
- const float coordsY[16] = {0,0,0,0, 1,1,1,1, 2,2,2,2, 3,3,3,3};
- float sumW=0, wx=0, wy=0;
- for (int i = 0; i < 16; i++) {
- float norm = pow((arr[i] - minV)/(maxV - minV), 4);
- wx += coordsX[i] * norm;
- wy += coordsY[i] * norm;
- sumW += norm;
- }
- x = wx/sumW - 1.5;
- y = wy/sumW - 1.5;
- }
-
- void checkButton() {
- bool state = digitalRead(BUTTON_PIN);
- unsigned long now = millis();
- static bool lastState = LOW;
-
- if (state && !lastState) {
- pressStart = now;
- buttonPressed = true;
- }
- if (buttonPressed && state && (now - pressStart > LONG_PRESS_TIME)) {
- Serial.println("Long Press Detected");
- buttonPressed = false;
- }
- if (buttonPressed && !state) {
- unsigned long dur = now - pressStart;
- if (dur >= SHORT_PRESS_TIME && dur < LONG_PRESS_TIME) {
- if (now - lastPress < DOUBLE_PRESS_TIME) {
- Serial.println("Double Press Detected");
- singlePressFlag = false;
- } else {
- singlePressFlag = true;
- }
- lastPress = now;
- }
- buttonPressed = false;
- }
- if (singlePressFlag && now - lastPress > DOUBLE_PRESS_TIME) {
- Serial.println("Single Press Detected");
- singlePressFlag = false;
- }
- lastState = state;
- }
-
- void sendSerialData() {
- for (int i = 0; i < 16; i++) {
- Serial.print(irSignal[i]);
- Serial.print(',');
- }
- Serial.print(centerX); Serial.print(',');
- Serial.print(centerY); Serial.print(',');
- Serial.print(setpointX); Serial.print(',');
- Serial.println(setpointY);
- }
-
- void setTrajectory(float radius, float speed) {
- unsigned long now = millis();
- static unsigned long lastT = 0;
- float dt = (now - lastT)/2000.0;
- trajectoryAngle += speed * dt;
- setpointX = radius * cos(trajectoryAngle);
- setpointY = radius * sin(trajectoryAngle);
- lastT = now;
- }
|





 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖