本帖最后由 豆爸 于 2023-9-1 02:44 编辑
1 项目需求 制作一个电压表 具体要求:利用板上的电位计调节电压从0-3.3V之间变化,在OLED显示屏上显示电压值,可以以数字的方式,也可以以图形的方式来显示。
2 功能设计 2.1 电压测量功能
通过调节旋钮电位器(GPIO28)旋钮,模拟作为被测对象,产生0-3.3V之间变化的电压模拟量。 树莓派Pico内部ADC,模拟读取GPIO28数值,通过计算转换得到相应的电压值。
2.2 电压显示功能
将计算转换后的电压值,显示在OLED液晶屏上。
3 硬件介绍 3.1 STEP Pico
STEP Pico为兼容树莓派官方Pico的核心模块,在其基础上增加了4个WS2812彩色灯,以及一个复位按键,USB端口也改成了Type C。 采用了RaspberryPi官方自主研发的RP2040微处理器芯片,搭载了ARM Cortex M0+双核处理器,高达133MHz的运行频率,内置了264KB SRAM和2MB闪存,板载了26个多功能GPIO引脚,支持C/C++、Python编程。
3.2 树莓派Pico扩展板
- 2个按键输入
- 12个WS2812B RGB三色灯
- 1个姿态传感器
- 1个128*64 OLED显示屏
- 1个蜂鸣器
- 1个可调电位计
- 1路音频信号输入
4 功能实现 4.1流程图
(1)模拟读取树莓派Pico的GPIO28得到一个电压的数字量的值,并赋值给变量Value。 (2)通过计算,将电压数字量值Value转换成电压值,并赋值给VoltageValue。
4.2 Thonny的下载与安装
Thonny是一个面向初学者的 Python IDE。Thonny 由爱沙尼亚的 Tartu 大学开发,它采用了不同的方法,因为它的调试器是专为学习和教学编程而设计的。
5 功能实现 5.1 旋转电位器读数范围测量
1、machine库
读取ADC值
- <div align="left">adc_28 <font color="rgb(154, 110, 58)"><font face="PingFangSC-Regular, " "="">=</font></font> ADC<font color="rgb(153, 153, 153)"><font face="PingFangSC-Regular, " "="">(</font></font><font color="rgb(153, 0, 85)"><font face="PingFangSC-Regular, " "="">28</font></font><font color="rgb(153, 153, 153)"><font face="PingFangSC-Regular, " "="">) </font></font><font color="rgb(112, 128, 144)"><font face="PingFangSC-Regular, " "="">#</font></font><font color="rgb(112, 128, 144)"><font face="PingFangSC-Regular, " "="">初始化</font></font></div><div align="left"><font color="rgb(112, 128, 144)"><font face="PingFangSC-Regular, " "="">ADC</font></font>Value <font color="rgb(154, 110, 58)"><font face="PingFangSC-Regular, " "="">=</font></font> adc_28<font color="rgb(153, 153, 153)"><font face="PingFangSC-Regular, " "="">.</font></font>read_u16<font color="rgb(153, 153, 153)"><font face="PingFangSC-Regular, " "="">(</font></font><font color="rgb(153, 153, 153)"><font face="PingFangSC-Regular, " "="">) </font></font><span style="color: rgb(112, 128, 144);">#读取ADC的值,返回16位数</span></div>
2、读取并打印旋转电位器数值
- from machine import Pin, ADC
- import time
- adc_28 = ADC(28)
- while True:
- Value = adc_28.read_u16()
- print(Value)
- time.sleep(0.1)
执行上述代码,打开串口监视器,并将旋钮电位器分别顺时针、逆时针拧到头,查看打印的数值,查找最大值和最小值。 经过测试,旋转电位器最小值为256,旋转电位器最大值为65535。
5.2 将读取到Value的转化为电压
计算方法:(读取的旋转电位器值Value - 旋转电位器最小值)/(旋转电位器最大值 - 旋转电位器最小值)*3.3 这里乘以3.3的,是基于我们认定旋转电位器最小值对应于电压0V,旋转电位器最大值对应于3.3V。 因此,VoltageValue = (Value - 256)/(65535 - 256)*3.3
5.3 电压显示
树莓派Pico扩展板板载了一块0.96寸SSD1306驱动的SPI接口的OLED。 从Pico训练板的原理图可知,OLED各SPI引脚连接的GPIO。 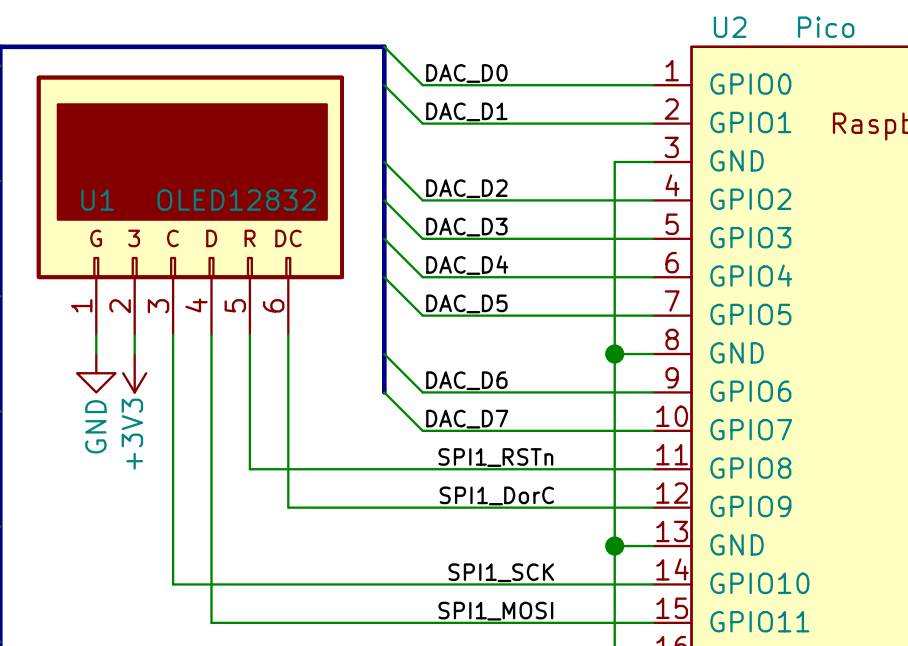 1、SSD1306库
这里我们使用了一个OLED驱动库文件ssd1306.py,这个文件可以从github下载,也可以新建一个ssd1306.py的文件,将下面代码复制粘贴进去。
- # MicroPython SSD1306 OLED driver, I2C and SPI interfaces
-
- from micropython import const
- import framebuf
-
-
- # register definitions
- SET_CONTRAST = const(0x81)
- SET_ENTIRE_ON = const(0xA4)
- SET_NORM_INV = const(0xA6)
- SET_DISP = const(0xAE)
- SET_MEM_ADDR = const(0x20)
- SET_COL_ADDR = const(0x21)
- SET_PAGE_ADDR = const(0x22)
- SET_DISP_START_LINE = const(0x40)
- SET_SEG_REMAP = const(0xA0)
- SET_MUX_RATIO = const(0xA8)
- SET_IREF_SELECT = const(0xAD)
- SET_COM_OUT_DIR = const(0xC0)
- SET_DISP_OFFSET = const(0xD3)
- SET_COM_PIN_CFG = const(0xDA)
- SET_DISP_CLK_DIV = const(0xD5)
- SET_PRECHARGE = const(0xD9)
- SET_VCOM_DESEL = const(0xDB)
- SET_CHARGE_PUMP = const(0x8D)
-
- # Subclassing FrameBuffer provides support for graphics primitives
- # http://docs.micropython.org/en/latest/pyboard/library/framebuf.html
- class SSD1306(framebuf.FrameBuffer):
- def __init__(self, width, height, external_vcc):
- self.width = width
- self.height = height
- self.external_vcc = external_vcc
- self.pages = self.height // 8
- self.buffer = bytearray(self.pages * self.width)
- super().__init__(self.buffer, self.width, self.height, framebuf.MONO_VLSB)
- self.init_display()
-
- def init_display(self):
- for cmd in (
- SET_DISP, # display off
- # address setting
- SET_MEM_ADDR,
- 0x00, # horizontal
- # resolution and layout
- SET_DISP_START_LINE, # start at line 0
- SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0
- SET_MUX_RATIO,
- self.height - 1,
- SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0
- SET_DISP_OFFSET,
- 0x00,
- SET_COM_PIN_CFG,
- 0x02 if self.width > 2 * self.height else 0x12,
- # timing and driving scheme
- SET_DISP_CLK_DIV,
- 0x80,
- SET_PRECHARGE,
- 0x22 if self.external_vcc else 0xF1,
- SET_VCOM_DESEL,
- 0x30, # 0.83*Vcc
- # display
- SET_CONTRAST,
- 0xFF, # maximum
- SET_ENTIRE_ON, # output follows RAM contents
- SET_NORM_INV, # not inverted
- SET_IREF_SELECT,
- 0x30, # enable internal IREF during display on
- # charge pump
- SET_CHARGE_PUMP,
- 0x10 if self.external_vcc else 0x14,
- SET_DISP | 0x01, # display on
- ): # on
- self.write_cmd(cmd)
- self.fill(0)
- self.show()
-
- def poweroff(self):
- self.write_cmd(SET_DISP)
-
- def poweron(self):
- self.write_cmd(SET_DISP | 0x01)
-
- def contrast(self, contrast):
- self.write_cmd(SET_CONTRAST)
- self.write_cmd(contrast)
-
- def invert(self, invert):
- self.write_cmd(SET_NORM_INV | (invert & 1))
-
- def rotate(self, rotate):
- self.write_cmd(SET_COM_OUT_DIR | ((rotate & 1) << 3))
- self.write_cmd(SET_SEG_REMAP | (rotate & 1))
-
- def show(self):
- x0 = 0
- x1 = self.width - 1
- if self.width != 128:
- # narrow displays use centred columns
- col_offset = (128 - self.width) // 2
- x0 += col_offset
- x1 += col_offset
- self.write_cmd(SET_COL_ADDR)
- self.write_cmd(x0)
- self.write_cmd(x1)
- self.write_cmd(SET_PAGE_ADDR)
- self.write_cmd(0)
- self.write_cmd(self.pages - 1)
- self.write_data(self.buffer)
-
-
- class SSD1306_I2C(SSD1306):
- def __init__(self, width, height, i2c, addr=0x3C, external_vcc=False):
- self.i2c = i2c
- self.addr = addr
- self.temp = bytearray(2)
- self.write_list = [b"\x40", None] # Co=0, D/C#=1
- super().__init__(width, height, external_vcc)
-
- def write_cmd(self, cmd):
- self.temp[0] = 0x80 # Co=1, D/C#=0
- self.temp[1] = cmd
- self.i2c.writeto(self.addr, self.temp)
-
- def write_data(self, buf):
- self.write_list[1] = buf
- self.i2c.writevto(self.addr, self.write_list)
-
-
- class SSD1306_SPI(SSD1306):
- def __init__(self, width, height, spi, dc, res, cs, external_vcc=False):
- self.rate = 10 * 1024 * 1024
- dc.init(dc.OUT, value=0)
- res.init(res.OUT, value=0)
- cs.init(cs.OUT, value=1)
- self.spi = spi
- self.dc = dc
- self.res = res
- self.cs = cs
- import time
-
- self.res(1)
- time.sleep_ms(1)
- self.res(0)
- time.sleep_ms(10)
- self.res(1)
- super().__init__(width, height, external_vcc)
-
- def write_cmd(self, cmd):
- self.spi.init(baudrate=self.rate, polarity=0, phase=0)
- self.cs(1)
- self.dc(0)
- self.cs(0)
- self.spi.write(bytearray([cmd]))
- self.cs(1)
-
- def write_data(self, buf):
- self.spi.init(baudrate=self.rate, polarity=0, phase=0)
- self.cs(1)
- self.dc(1)
- self.cs(0)
- self.spi.write(buf)
- self.cs(1)
将ssd1306.py驱动文件通过Thonny上传到Pico的根目录,如下图所示。
使用方法:
- #导入Pin, SoftSPI, ssd1306
-
- from machine import Pin, SoftSPI
- import ssd1306
- #实例化spi
-
- spi = SoftSPI(baudrate=500000, polarity=1, phase=0, sck=Pin(10), mosi=Pin(11),
- #定义引脚
-
- miso = Pin(12))
- dc = Pin(9)
- rst = Pin(8)
- cs = Pin(23)
- #实例化ssd1306
-
- display = ssd1306.SSD1306_SPI(128, 64, spi, dc, rst, cs)
- #清屏
-
- display.fill(0)
- #显示VoltageValue
-
- display.text(str(VoltageValue), 50, 30, 1)
- display.show()
6 完整代码
- from machine import Pin, ADC, SoftSPI
- import ssd1306
- import time
- adc_28 = ADC(28)
- spi = SoftSPI(baudrate=500000, polarity=1, phase=0, sck=Pin(10), mosi=Pin(11), miso=Pin(12))
- dc = Pin(9)
- rst = Pin(8)
- cs = Pin(23)
- display = ssd1306.SSD1306_SPI(128, 64, spi, dc, rst, cs)
- while True:
- Value = adc_28.read_u16()
- VoltageValue = (Value - 256)/(65535 - 256)*3.3
- print(VoltageValue)
- display.fill(0)
- display.text(str(VoltageValue), 50, 30, 1)
- display.show()
- time.sleep(0.5)
7 运行效果
程序运行效果如下图所示:
程序运行后,PC端显示如下图所示: 可以看出,电压随着旋转变阻器的转动而变化,电压在0V到3.3V之间连续变化。 |
|


 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶