本帖最后由 云天 于 2022-5-23 21:36 编辑
【项目设计】
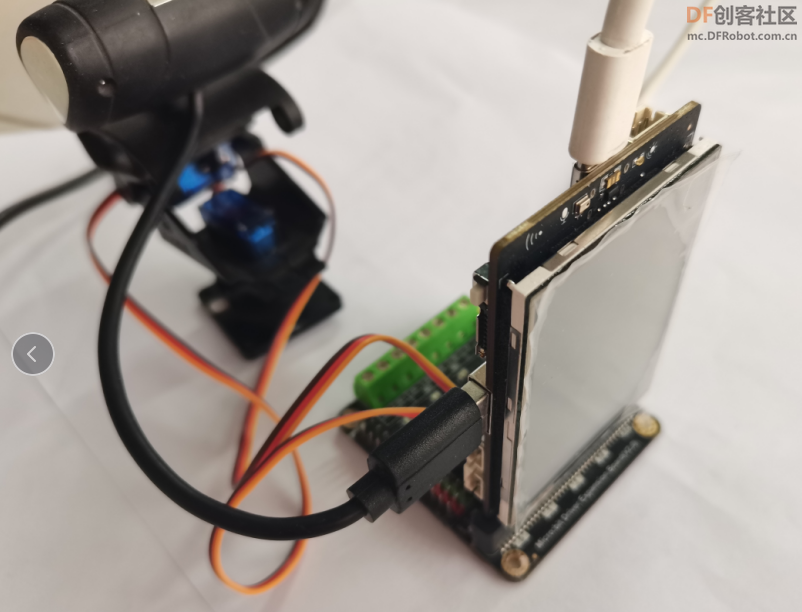
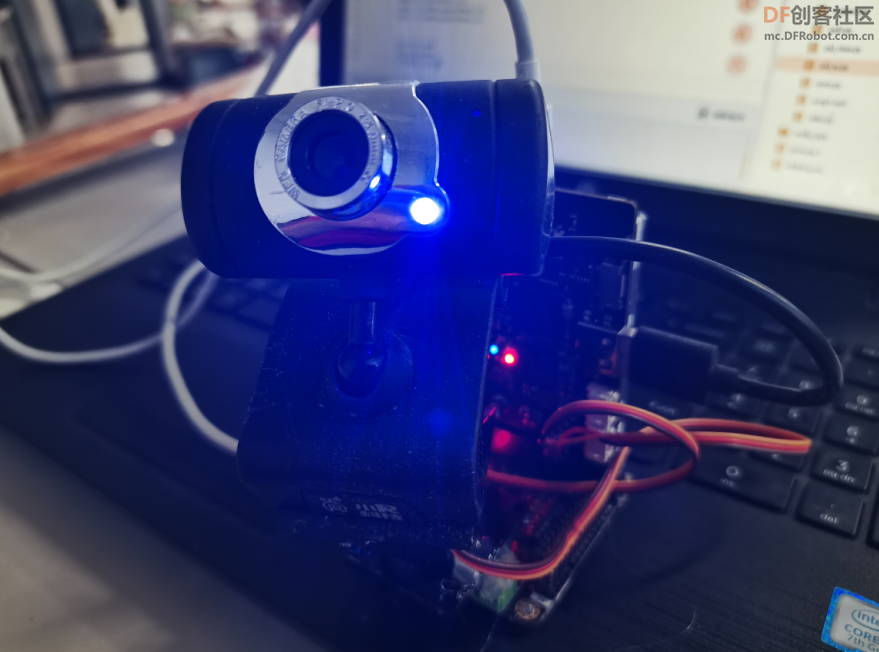
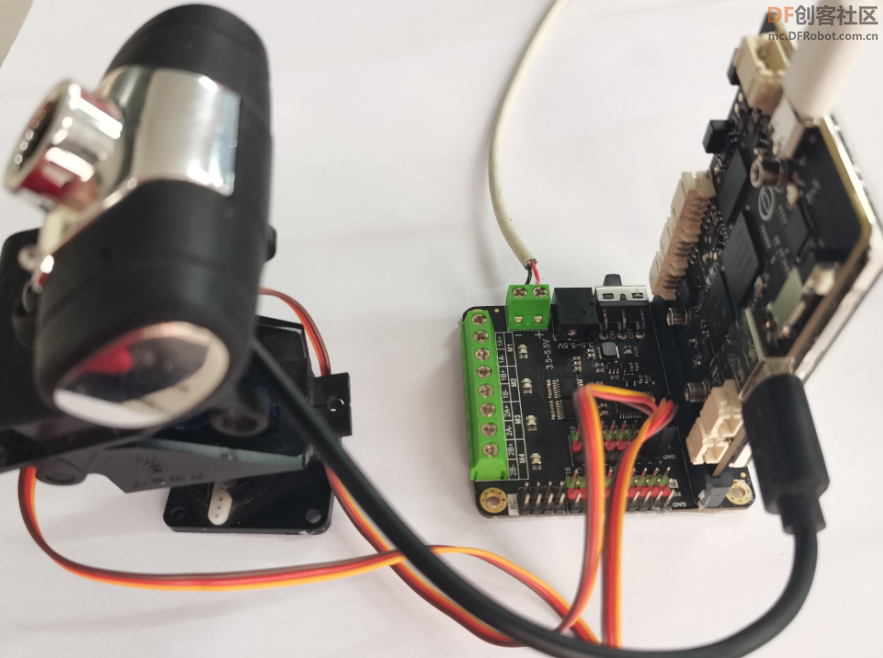
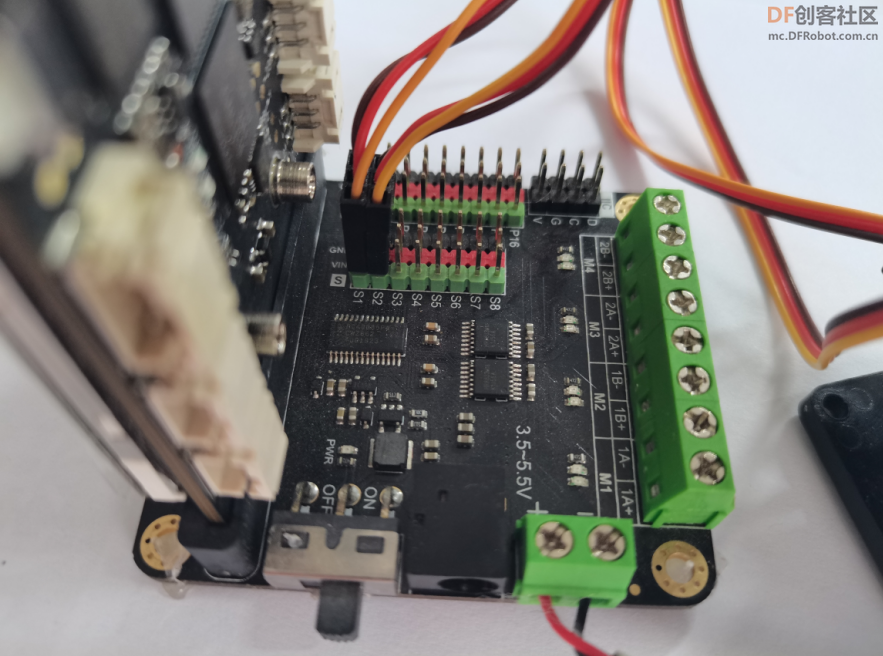
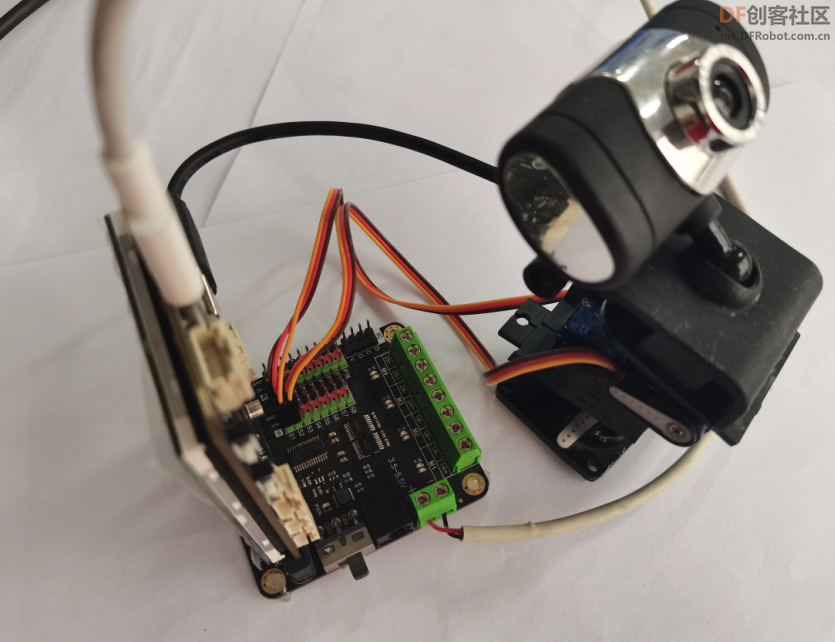
已经掌握了行控板与micro:bit扩展板的结合的使用方法,那么扩展板上的舵机引脚就可以驱动摄像头云台。
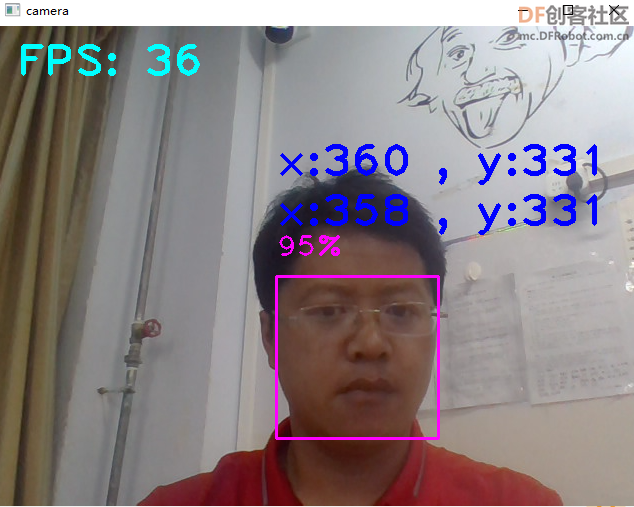
Mediapipe获取人脸中心坐标,通过滤波算法使用得数据不频繁抖动。通过PID算法,控制舵机运行,追踪人脸。
【控制舵机】
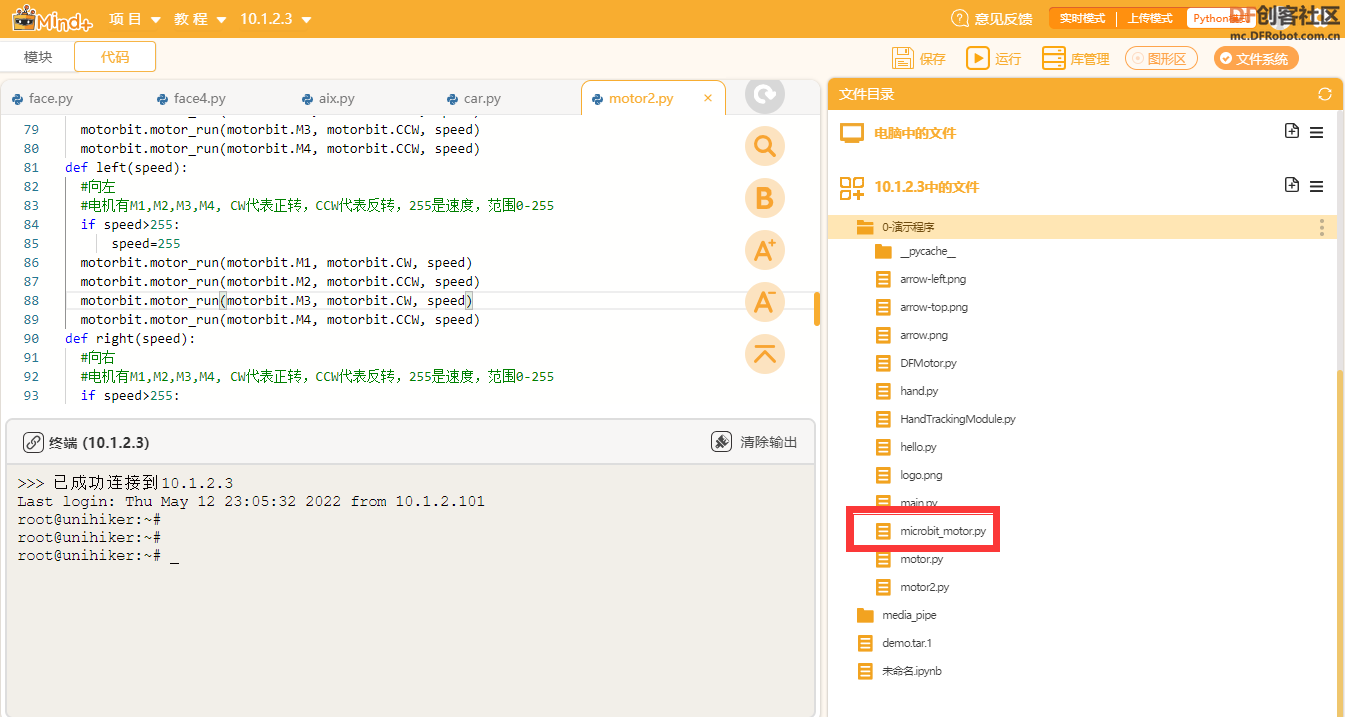
microbit_motor.py文件可从Pinpong库中找到,上传到行空板中,应与主文件在同一个文件夹内。
-
- # -*- coding: utf-8 -*-
- import time
- from pinpong.board import Board
- from microbit_motor import Microbit_Motor #导入Microbit_Motor库
-
- Board("microbit").begin() #初始化,选择板型和端口号,不输入端口号则进行自动识别
- #Board("microbit","COM36").begin() #windows下指定端口初始化
- #Board("microbit","/dev/ttyACM0").begin() #linux下指定端口初始化
- #Board("microbit","/dev/cu.usbmodem14101").begin() #mac下指定端口初始化
-
- motorbit = Microbit_Motor()
-
- while True:
- #舵机引脚S1-S8,角度范围0-180
- motorbit.servo(motorbit.S2, 0)
- time.sleep(1)
- motorbit.servo(motorbit.S2, 90)
- time.sleep(1)
- motorbit.servo(motorbit.S2, 180)
- time.sleep(1)
- motorbit.servo(motorbit.S2, 90)
- time.sleep(1)
【行空板获取摄像头全屏】在行空板网页端使用Jupyter notebook,在终端使用:pip install cvzone,安装cvzone
-
- import cvzone.FaceDetectionModule as face
- import cv2
- import numpy as np
- import time
-
-
-
-
-
- def main():
- cap = cv2.VideoCapture(0)
- cap.set(cv2.CAP_PROP_FRAME_WIDTH, 320)
- cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 240)
- cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
- cv2.namedWindow('camera',cv2.WND_PROP_FULLSCREEN) #窗口全屏
- cv2.setWindowProperty('camera', cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN) #窗口全屏
- detector = face.FaceDetector()
- # For a 640x480 image center target is 320 and 240
-
-
- while True:
- success, img = cap.read()
- img, bboxs = detector.findFaces(img)
- if bboxs:
- x, y, w, h = bboxs[0]["bbox"]
- cx, cy = bboxs[0]["center"]
- xVal=cx
- yVal=cy
- cv2.putText(img, f'x:{xVal} , y:{yVal} ', (x, y - 100), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
- output_image = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE)
- cv2.imshow("camera", output_image)
- cv2.waitKey(1)
-
-
- if __name__ == "__main__":
- main()
-
【人脸中心数据滤波】
使用的是“递推平均滤波法”:
递推平均滤波法(又称滑动平均滤波法)
方法: 把连续取N个采样值看成一个队列,遵循先进先出原则 队列的长度固定为N 每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则) 把队列中的N个数据进行算术平均运算,就可获得新的滤波结果 N值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4
优点: 对周期性干扰有良好的抑制作用,平滑度高 适用于高频振荡的系统
缺点: 灵敏度低 对偶然出现的脉冲性干扰的抑制作用较差 不易消除由于脉冲干扰所引起的采样值偏差 不适用于脉冲干扰比较严重的场合 比较浪费RAM
-
- import cvzone.FaceDetectionModule as face
- import cv2
- import numpy as np
- import time
-
-
-
-
-
- def main():
- cap = cv2.VideoCapture(0)
- #cap.set(cv2.CAP_PROP_FRAME_WIDTH, 320)
- #cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 240)
- #cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
- #cv2.namedWindow('camera',cv2.WND_PROP_FULLSCREEN) #窗口全屏
- #cv2.setWindowProperty('camera', cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN) #窗口全屏
- detector = face.FaceDetector()
- s=[0,0,0,0,0,0,0,0,0,0,0,0]
- while True:
- PTime = time.time()
- success, img = cap.read()
- img, bboxs = detector.findFaces(img)
- if bboxs:
- x, y, w, h = bboxs[0]["bbox"]
- cx, cy = bboxs[0]["center"]
- xVal=cx
- yVal=cy
- cv2.putText(img, f'x:{xVal} , y:{yVal} ', (x, y - 100), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
- #output_image = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE)
- s.pop(0)
- s.append(cx)
- mean=int(np.mean(s))
- cv2.putText(img, f'x:{mean} , y:{yVal} ', (x, y - 50), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
- fps = 1 / (time.time() - PTime)
- cv2.putText(img, f'FPS: {int(fps)}', (20,50), cv2.FONT_HERSHEY_PLAIN,
- 3, (255, 255, 0), 3)
- cv2.imshow("camera", img)
- cv2.waitKey(1)
-
-
- if __name__ == "__main__":
- main()
-
【PID控制水平舵机】
-
- import cvzone.FaceDetectionModule as face
- import cv2
- import numpy as np
- import time
- from pinpong.board import Board
- from microbit_motor import Microbit_Motor #导入Microbit_Motor库
-
- Board("microbit").begin()
- motorbit = Microbit_Motor()
- targetVal=0
- pError=0
- pTime=0
- pidVals=[0.03,0,0.01]
- I=0
- jd_x=90
- def pid(cVal):
- global I,pidVals,pTime,pError,targetVal
- # Current Value - Target Value
- t = time.time() - pTime
- error = cVal - targetVal
- P = pidVals[0] * error
- I = I + (pidVals[1] * error * t)
- D = (pidVals[2] * (error - pError)) / t
-
- result = P + I + D
-
-
- pError = error
- ptime = time.time()
-
- return result
-
-
-
- def main():
- global ptime,jd_x
- cap = cv2.VideoCapture(0)
- cap.set(cv2.CAP_PROP_FRAME_WIDTH, 320)
- cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 240)
- cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
- cv2.namedWindow('camera',cv2.WND_PROP_FULLSCREEN) #窗口全屏
- cv2.setWindowProperty('camera', cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN) #窗口全屏
- detector = face.FaceDetector()
- s=[0,0,0,0,0,0]
- ptime = time.time()
- motorbit.servo(motorbit.S2,jd_x)
- pre_jd_x=0
- while True:
- PTime = time.time()
- success, img = cap.read()
- img, bboxs = detector.findFaces(img)
- if bboxs:
- x, y, w, h = bboxs[0]["bbox"]
- cx, cy = bboxs[0]["center"]
- xVal=cx
- yVal=cy
- cv2.putText(img, f'x:{xVal} , y:{yVal} ', (x, y - 100), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
-
- s.pop(0)
- s.append(cx)
- mean=int(np.mean(s))
- jd_x=jd_x+int(pid(160-mean))
- if jd_x<1:
- jd_x=1
- if jd_x>179:
- jd_x=179
- print(jd_x)
- if pre_jd_x !=jd_x:
- pre_jd_x =jd_x
- motorbit.servo(motorbit.S2,jd_x)
- cv2.putText(img, f'x:{mean} , y:{yVal} ', (x, y - 50), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
- fps = 1 / (time.time() - PTime)
- cv2.putText(img, f'FPS: {int(fps)}', (20,50), cv2.FONT_HERSHEY_PLAIN,
- 3, (255, 255, 0), 3)
- output_image = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE)
- cv2.imshow("camera", output_image)
- cv2.waitKey(1)
-
-
- if __name__ == "__main__":
- main()
-
【使用PID类控制水平】
-
- import cvzone.FaceDetectionModule as face
- import cv2
- import numpy as np
- import time
- from pinpong.board import Board
- from microbit_motor import Microbit_Motor #导入Microbit_Motor库
-
- Board("microbit").begin()
- motorbit = Microbit_Motor()
- targetVal=0
- pError=0
- pTime=0
- pidVals=[0.03,0,0.01]
- I=0
- jd_x=90
- class PID:
- def __init__(self, pidVals, targetVal, limit=None):
- self.pidVals = pidVals
- self.targetVal = targetVal
- self.pError = 0
- self.limit = limit
- self.I = 0
- self.pTime = 0
- def update(self,cVal):
-
- # Current Value - Target Value
- t = time.time() - self.pTime
- error = cVal - self.targetVal
- P = self.pidVals[0] * error
- self.I = self.I + (self.pidVals[1] * error * t)
- D = (self.pidVals[2] * (error - self.pError)) / t
-
- result = P + self.I + D
- if self.limit is not None:
- result = float(np.clip(result, self.limit[0], self.limit[1]))
-
- self.pError = error
- self.ptime = time.time()
-
- return result
-
-
-
- def main():
-
- cap = cv2.VideoCapture(0)
- cap.set(cv2.CAP_PROP_FRAME_WIDTH, 320)
- cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 240)
- cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
- cv2.namedWindow('camera',cv2.WND_PROP_FULLSCREEN) #窗口全屏
- cv2.setWindowProperty('camera', cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN) #窗口全屏
- detector = face.FaceDetector()
- s_x=[0,0,0,0,0,0]
- jd_x=90
- pre_jd_x=0
- motorbit.servo(motorbit.S2,jd_x)
- xPID = PID([0.03, 0.000000000001, 0.01], 320 // 2, limit=[-90, 90])
- while True:
- PTime = time.time()
- success, img = cap.read()
- img, bboxs = detector.findFaces(img)
- if bboxs:
- x, y, w, h = bboxs[0]["bbox"]
- cx, cy = bboxs[0]["center"]
- xVal=cx
- yVal=cy
- cv2.putText(img, f'x:{xVal} , y:{yVal} ', (x, y - 100), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
-
- s_x.pop(0)
- s_x.append(cx)
- mean_x=int(np.mean(s_x))
-
- xVal= int(xPID.update(mean_x))
- jd_x=jd_x-xVal
- print(jd_x)
- if pre_jd_x !=jd_x:
- pre_jd_x =jd_x
- motorbit.servo(motorbit.S2,jd_x)
- cv2.putText(img, f'x:{mean_x} , y:{yVal} ', (x, y - 50), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
- fps = 1 / (time.time() - PTime)
- cv2.putText(img, f'FPS: {int(fps)}', (20,50), cv2.FONT_HERSHEY_PLAIN,
- 3, (255, 255, 0), 3)
- output_image = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE)
- cv2.imshow("camera", output_image)
- cv2.waitKey(1)
-
-
- if __name__ == "__main__":
- main()
-
【控制水平和垂直舵机】
-
- import cvzone.FaceDetectionModule as face
- import cv2
- import numpy as np
- import time
- from pinpong.board import Board
- from microbit_motor import Microbit_Motor #导入Microbit_Motor库
-
- Board("microbit").begin()
- motorbit = Microbit_Motor()
- targetVal=0
- pError=0
- pTime=0
- pidVals=[0.03,0,0.01]
- I=0
- jd_x=90
- class PID:
- def __init__(self, pidVals, targetVal, limit=None):
- self.pidVals = pidVals
- self.targetVal = targetVal
- self.pError = 0
- self.limit = limit
- self.I = 0
- self.pTime = 0
- def update(self,cVal):
-
- # Current Value - Target Value
- t = time.time() - self.pTime
- error = cVal - self.targetVal
- P = self.pidVals[0] * error
- self.I = self.I + (self.pidVals[1] * error * t)
- D = (self.pidVals[2] * (error - self.pError)) / t
-
- result = P + I + D
- if self.limit is not None:
- result = float(np.clip(result, self.limit[0], self.limit[1]))
-
- self.pError = error
- self.ptime = time.time()
-
- return result
-
-
-
- def main():
-
- cap = cv2.VideoCapture(0)
- cap.set(cv2.CAP_PROP_FRAME_WIDTH, 320)
- cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 240)
- cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
- cv2.namedWindow('camera',cv2.WND_PROP_FULLSCREEN) #窗口全屏
- cv2.setWindowProperty('camera', cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN) #窗口全屏
- detector = face.FaceDetector()
- s_x=[0,0,0,0,0,0]
- s_y=[0,0,0,0,0,0]
- jd_x=90
- jd_y=135
- pre_jd_y=0
- motorbit.servo(motorbit.S1,jd_y)
- xPID = PID([0.03, 0.000000000001, 0.01], 320 // 2, limit=[-90, 90])
- yPID = PID([0.03, 0.000000000001, 0.01], 240 // 2, limit=[-45, 45])
- while True:
- PTime = time.time()
- success, img = cap.read()
- img, bboxs = detector.findFaces(img)
- if bboxs:
- x, y, w, h = bboxs[0]["bbox"]
- cx, cy = bboxs[0]["center"]
- xVal=cx
- yVal=cy
- cv2.putText(img, f'x:{xVal} , y:{yVal} ', (x, y - 100), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
-
- s_x.pop(0)
- s_y.pop(0)
- s_x.append(cx)
- s_y.append(cy)
- mean_x=int(np.mean(s_x))
- mean_y=int(np.mean(s_y))
- xVal= int(xPID.update(mean_x))
- yVal= int(yPID.update(mean_y))
-
-
- jd_x=jd_x-xVal
- jd_y=jd_y-yVal
- print(jd_x,jd_y)
- if pre_jd_x !=jd_x:
- pre_jd_x =jd_x
- motorbit.servo(motorbit.S2,jd_x)
- if pre_jd_y !=jd_y:
- pre_jd_y =jd_y
- motorbit.servo(motorbit.S1,jd_y)
- cv2.putText(img, f'x:{mean_x} , y:{mean_y} ', (x, y - 50), cv2.FONT_HERSHEY_PLAIN, 3,
- (255, 0, 0), 3)
- fps = 1 / (time.time() - PTime)
- cv2.putText(img, f'FPS: {int(fps)}', (20,50), cv2.FONT_HERSHEY_PLAIN,
- 3, (255, 255, 0), 3)
- output_image = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE)
- cv2.imshow("camera", output_image)
- cv2.waitKey(1)
-
-
- if __name__ == "__main__":
- main()
-
【演示视频】
|


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 试了下,行空板连接microBIT扩展板贼好用!学到了!谢谢!
试了下,行空板连接microBIT扩展板贼好用!学到了!谢谢!
 活跃会员
活跃会员
 宣传大使
宣传大使
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖